
The latest build of ARMOR (v0.10) is now live on TestFlight, marking a significant milestone in bringing professional robotics workflows to the visionOS and iOS ecosystems. This update bridges the gap between desktop simulation and mobile spatial computing, allowing engineers to not only visualize but also define and export complex robot semantics directly from their devices.
Native Semantic Robot Description (SRDF) Editing
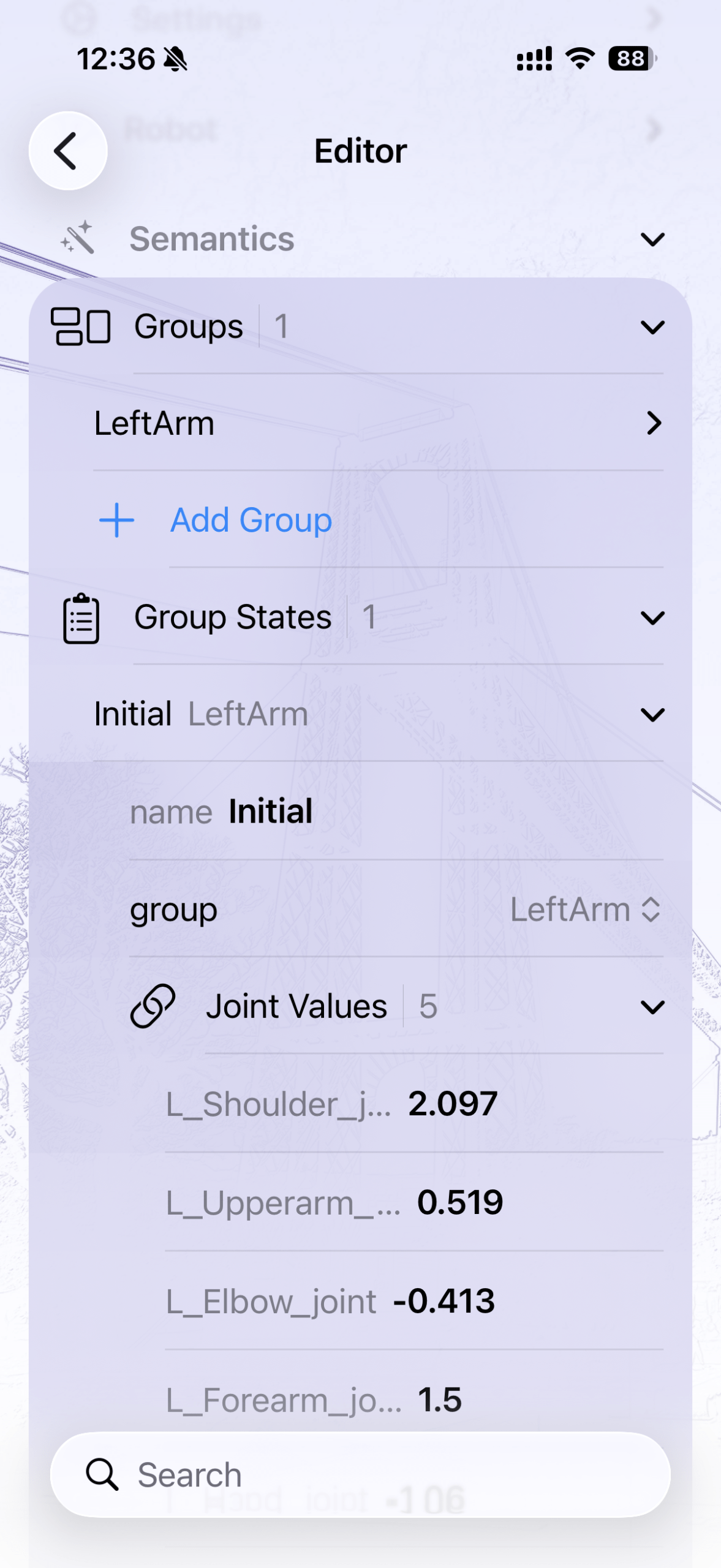
The headline feature of v0.10 is the introduction of a native Semantic Editor. In the ROS ecosystem, the SRDF (Semantic Robot Description Format) is essential for defining joint groups, default poses, and collision behaviors.
By tapping the “Magic Wand” icon in the lower right corner the RealityView, users can now launch a step-by-step Semantic Editing Wizard. This allows for:
- Group Definition: Easily group joints into logical assemblies like “Right Arm,” “Legs,” or “End Effectors.”
- State Specification: Set initial values and joint states using intuitive number inputs or sliders.
- Real-Time Feedback: The robot updates its pose in the spatial environment instantly as you adjust values, providing immediate visual validation of your kinematic chain.


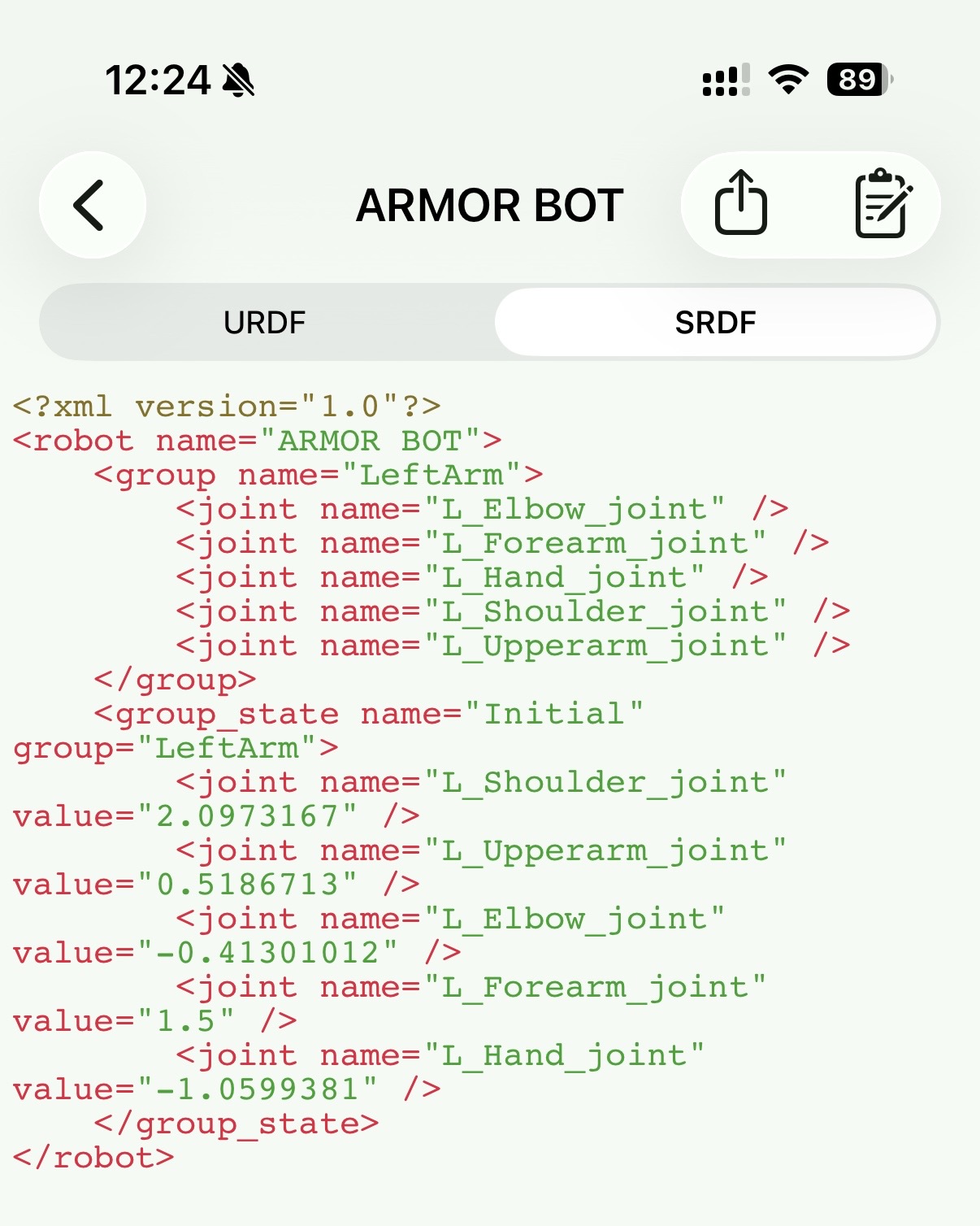
Robot XML Viewing
For power users, ARMOR v0.10 provides full transparency into the underlying data structures. By tapping the XML tab at the bottom of the wizard, you can view the live-generated SRDF structure. If you need to make manual adjustments, a full XML editor is available via the edit button in the upper-right corner, allowing for direct code manipulation without leaving the app.
Universal Export: From iPhone to MuJoCo Desktop
Sharing your work is now more versatile than ever. The new Share Button introduces two powerful ways to move your robotics projects across platforms:
- ARMOR Project Export: Share a native
.armorprojectfile that other users can load to replicate your exact setup. - URDF Bundle (ZIP): For cross-platform workflows. ARMOR now packages a complete directory containing:
- The URDF XML file.
- Automatically organized folders for all referenced assets (STL, OBJ, USDZ, or DAE).
- A generated MJCF (MuJoCo XML) file, ready to be dropped directly into the MuJoCo desktop application for high-fidelity physics simulation.


Bridging the Mobile-Desktop Gap
Whether you are searching for a way to read URDF files on an iPhone, visualize ROS workflows on an iPad, or prepare MuJoCo models in the field, ARMOR v0.10 provides the professional-grade tools required for modern spatial robotics engineering.

I am looking for feedback from the robotics community on these semantic tools as I move toward a wider release. If you want to learn more about AR Mobile Robotics, check out its official site. There are also a few posts you can check out, like this one about what I’ve been up to in my life during the time of ARMOR’s development, or this one about some of the open source packages I’ve created, and use inside ARMOR.